ربات فوتبالیست یکی دیگر از محصوالت آکادمی نخبگان خالق جوان میباشد که در
راستای آموزش رباتیک و الکترونیک عرضه میگردد.
این ربات که تشکیل شده از فیبر مدار چاپی ، مقاومت ها ، پین دوتایی ، نری و مادگی
تلفن ، سیم تلفن ،LED ، کلید اهرمی و باتری میباشد ؛ امکان شناخت بهتر قطعات ، یادگیری
شماتیک های الکتریکی ، ابزار الکتریکی ، تقویت مهارت لحیم کاری و … را به دانش آموزان
میدهد.
نحوه کارکرد ربات فوتبالیست به صورتی میباشد که با وصل کردن باتری به ربات ، ربات
دارای قابلیت شوت کردن و هدایت توپ خواهد شد و میتواند به جهت های مختلف حرکت
کند در مسابقات فوتبالیست شرکت نماید.
توجه : لطفا طبق نقشه ای که در جزوه قرارگرفته است برد را سرهم کنید و به
عالئم + و – روی برد توجه نفرمایید.
توجه : برای این که قطعات را به صورت صحیح در مدار جای گذاری کرده و آن را
درست لحیم کاری کنید باید بعد از جای گذاری یک دسته مشخص از لوازم روی مدار و
تعیین کردن جای آن ها ، شروع به لحیم کاری کنید. برای مثال اول مقاومت ها را جایگذاری
میکنیم ، پس از اتمام جای گذاری مقاومت ها را لحیم میکنیم و پایه های اضافی را با سیم
چین یا ناخن گیر قطع میکنیم سپس به سراغ جای گذاری دسته بعدی میرویم و تا آخر به
همین صورت پیش خواهیم رفت.
1( ابتدا شکل زیر را روی مدار پیدا کرده سپس جامپر را در قسمت مشخص شده جایگذاری
میکنیم و پس از اطمینان از درست بودن جایگاه لحیم می کنیم.
2( ابتدا شماتیک مقاومت KΩ 10 را روی فیبر مدار چاپی پیدا کرده سپس جای گذاری
میکنیم و پس از این که از درست بودن جای قطعه مطمئن شدیم آن ها را لحیم میکنیم و
پایه های اضافی را با سیم چین یا ناخن گیر قطع میکنیم.)
3( اکنون باید ال ای دی قرمز را در جایگاه مشخص شده قرار دهیم و پس از اطمینان از
درستی جایگاه لحیم کنیم. )
– روش های تشخیص قطب های LED :
.1 پایه بلند مثبت و پایه کوتاه منفی میباشد .
.2 بدنه LED در پایه منفی دارای شکستگی میباشد.
.3 در داخل LED پایه منفی همانند چکش و پایه مثبت همانند میخ میباشد.
4( اکنون نوبت به کلید های اهرمی میرسد ؛ کلید های اهرمی را مطابق شکل زیر جایگذاری
میکنیم به صورتی که قسمت اهرمی آن ها به طرف پایین باشد و پس از این که از درست
بودن جای قطعه مطمئن شدیم آن ها را لحیم میکنیم. )
5( نوبت به مادگی های تلفن میرسد ، دو عدد از مادگی ها روی برد دسته کنترل قرارگرفته
و دو عدد دیگر در جعبه تقسیم قرار میگیرد . به صورتی که آن ها را در جایگاه خود جا زده
و پس از حاصل کردن اطمینان از درست بودن جایگاه ، آنها را لحیم خواهیم کرد. )
6( پین هدر ها را جای گذاری و لحیم می کنیم ؛ در جعبه تقسیم 1S حامل جریان برق بوده
و 2S ، 3S ، 4S ، 5S ، 6S ، 7S پین دوتایی میخورند ؛ آن ها را جای گذاری میکنیم.)
به دو عدد از موتور نادکویی ها دو عدد سیم دو پین و به یکی آن ها یک عدد سیم دو پین لحیم
.. می شود
توجه داشته باشید که موتور نادکویی سمت راست ربات به 2S و 5S متصل می شود و موتور
نادکویی سمت چپ ربات به 4S و 7S متصل می شود و موتور شوتر به 6S متصل می شود.
7( حالا نوبت به آماده کردن کابل های تلفن میرسد ، به دو طرف هر سیم یک نری تلفن
وصل کرده و پس از نصب ، آن ها را در جایگاه مادگی ها در دسته کنترل و جعبه تقسیم قرار
میدهیم.
8( ولتاژ راه اندازی این ربات V12 می باشد به همین دلیل باید دو عدد جا باتری را با یکدیگر
به صورت سری ببندیم زیرا ولتاژ هر جا باتری 4 تایی V6 می باشد. سیم قرمز سیم دو پین
را به سر سیم قرمز یکی از جا باتری ها متصل کنید و سیم مشکی سیم دو پین را نیز به سیم
مشکی جا باتری دیگر وصل کنید و یک سیم مشکی از جا باتری اول و یک سیم قرمز از جا
باتری دوم را هم به یکدیگر متصل کنید و دور آن را با چسب برق یا وارنیش بپوشانید . برق
جا باتری به قسمت BAT در برد دسته کنترل متصل می شود .
ربات فوتبالیست یکی دیگر از محصولات آکادمی نخبگان خالق جوان میباشد که در
راستای آموزش رباتیک و الکترونیک عرضه میگردد.
این ربات که تشکیل شده از فیبر مدار چاپی ، مقاومت ها پین دوتایی ، نری و مادگی تلفن
، سیم تلفن ،LED ، کلید اهرمی و باتری میباشد ؛ امکان شناخت بهتر قطعات ، یادگیری
شماتیک های الکتریکی ، ابزار الکتریکی ، تقویت مهارت لحیم کاری و … را به دانش آموزان
میدهد.
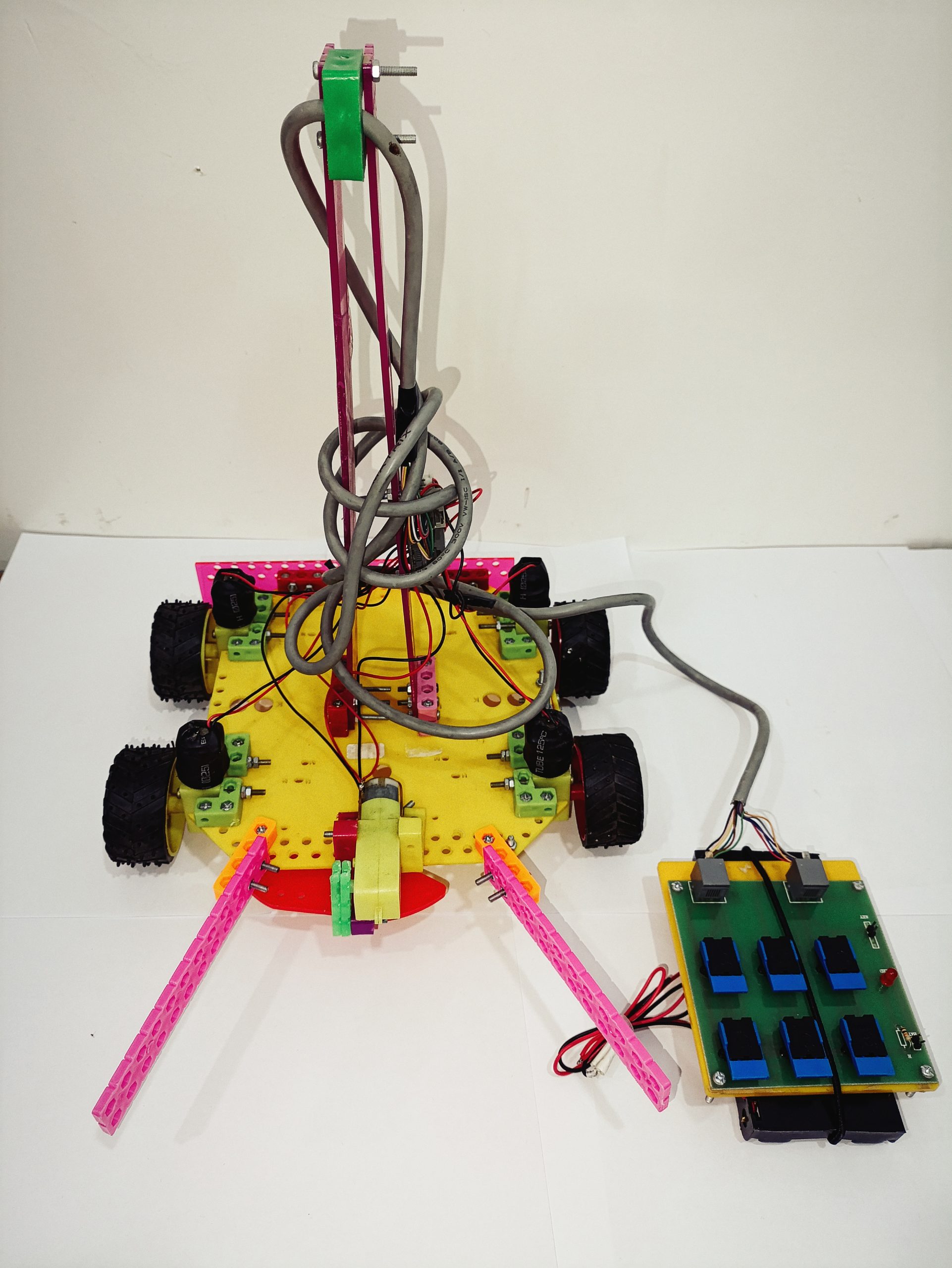
نحوه کارکرد ربات فوتبالیست به صورتی میباشد که با وصل کردن باتری به ربات ، ربات
دارای قابلیت شوت کردن و هدایت توپ خواهد شد و میتواند به جهت های مختلف حرکت
کند در مسابقات فوتبالیست شرکت نماید.
| نام قطعات | تعداد قطعات |
| مقاومت 10KΩ | 1عدد |
| LED قرمز 5m | 1عدد |
| کلید اهرمی | 6عدد |
| مادگی تلفن | 4عدد |
| نری تلفن | 4عدد |
| کابل 6 رشته سیم تلفن | 2عدد |
| پین دوتایی | 8عدد |
| سیم دو پین | 7عدد |
| جاباتری 4 تایی | 2عدد |
| موتور گیربکس نادکویی | 5عدد |
| چرخ آج دار | 4عدد |
| بسته پیچ | 1عدد |
| بسته المان | 1عدد |
| شاسی | 1عدد |
نحوه ساخت ربات فوتبالیست مسابقاتی
توجه : برای این که قطعات را به صورت صحیح در مدار جای گذاری کرده و آن را
درست لحیم کاری کنید باید بعد از جای گذاری یک دسته مشخص از لوازم روی مدار و
تعیین کردن جای آن ها ، شروع به لحیم کاری کنید. برای مثال اول مقاومت ها را جایگذاری
میکنیم ، پس از اتمام جای گذاری مقاومت ها را لحیم میکنیم و پایه های اضافی را با سیم
چین یا ناخن گیر قطع میکنیم سپس به سراغ جای گذاری دسته بعدی میرویم و تا آخر به
همین صورت پیش خواهیم رفت.
1( ابتدا شکل زیر را روی مدار پیدا کرده سپس جامپر را در قسمت مشخص شده جایگذاری
میکنیم و پس از اطمینان از درست بودن جایگاه لحیم می کنیم.
2( ابتدا شماتیک مقاومت KΩ 10 را روی فیبر مدار چاپی پیدا کرده سپس جای گذاری
میکنیم و پس از این که از درست بودن جای قطعه مطمئن شدیم آن ها را لحیم میکنیم و
پایه های اضافی را با سیم چین یا ناخن گیر قطع میکنیم.
3( اکنون باید LED قرمز را در جایگاه مشخص شده قرار دهیم و پس از اطمینان از درستی
جایگاه لحیم کنیم.
– روش های تشخیص قطب های LED :
.1 پایه بلند مثبت و پایه کوتاه منفی میباشد
2 بدنه LED در پایه منفی دارای شکستگی میباشد.
.3 در داخل LED پایه منفی همانند چکش و پایه مثبت همانند میخ میباشد.
4( اکنون نوبت به کلید های اهرمی میرسد ؛ کلید های اهرمی را مطابق شکل زیر جایگذاری
میکنیم به صورتی که قسمت اهرمی آن ها به طرف پایین باشد و پس از این که از درست
بودن جای قطعه مطمئن شدیم آن ها را لحیم میکنیم.
5( نوبت به مادگی های تلفن میرسد ، دو عدد از مادگی ها روی برد دسته کنترل قرارگرفته
و دو عدد دیگر در جعبه تقسیم قرار میگیرد . به صورتی که آن ها را در جایگاه خود جا زده
و پس از حاصل کردن اطمینان از درست بودن جایگاه ، آنها را لحیم خواهیم کرد.
6( پین هدر ها را جای گذاری و لحیم می کنیم ؛ در جعبه تقسیم 1S حامل جریان برق بوده
و 2S ، 3S ، 4S ، 5S ، 6S ، 7S پین دوتایی میخورند ؛ آن ها را جای گذاری میکنیم.
به یک عدد از موتور نادکویی ها ، دو عدد سیم دو پین و به سه عدد دیگر از آن ها ، یک عدد
سیم دو پین لحیم می شود.
سیم کشی دو موتور سمت راست و دو موتور سمت چپ
به صورت شکل رو به رو می باشد ؛ سیم دو پین ها را
از وسط لخت کرده و سیم های قرمز را به هم و همینطور
سیم های مشکی را به هم مطابق شکل رو به رو متصل
می کنیم. سپس یکی از چرخ ها را میچرخانیم و چرخ
دیگری باید در همان جهت بچرخد. در غیر این صورت
نحوه اتصال را برعکس می کنیم.
توجه داشته باشید که موتور های سمت راست ربات به 2S و 5S متصل می شود و موتور های
سمت چپ ربات به 4S و 7S متصل می شود و موتور شوتر به 3S و 6S متصل میشود.
7( حالا نوبت به آماده کردن کابل های تلفن میرسد ، به دو طرف هر سیم یک نری تلفن
وصل کرده و پس از نصب ، آن ها را در جایگاه مادگی ها در دسته کنترل و جعبه تقسیم قرار
میدهیم.
8( ولتاژ راه اندازی این ربات V12 می باشد به همین دلیل باید دو عدد جا باتری را با یکدیگر
به صورت سری ببندیم زیرا ولتاژ هر جا باتری 4 تایی V6 می باشد. سیم قرمز سیم دو پین
را به سر سیم قرمز یکی از جا باتری ها متصل کنید و سیم مشکی سیم دو پین را نیز به سیم
مشکی جا باتری دیگر وصل کنید و یک سیم مشکی از جا باتری اول و یک سیم قرمز از
جاباتری دوم را هم به یکدیگر متصل کنید و دور آن را با چسب برق یا وارنیش بپوشانید.
برق جا باتری به قسمت BAT در برد دسته کنترل متصل می شود .
موسسه ROBO_BM در سال ۱۳۹۲ توسط جمعی از مهندسین و دانش آموزان تهران به طور رسمی آغاز به فعالیت نمود و پا به عرصه ی مسابقات رباتیک،برنامه نویسی وچرتکه منطقه ای ، استانی و کشوری نهاد. از آغازین روزهای تاسیس ROBO_BM معتمد مخاطبان وفادار خود بوده ایم و سهم این مجموعه در پاسداشت این نگاه تا به امروز پاسخ شفاف به اعتماد و کسب رضایت درونی دانش آموزانمان بوده است.
 سبد خرید
سبد خرید  علاقهمندی
علاقهمندی  پروفایل
پروفایل 
هنوز دیدگاهی برای این مطلب ثبت نشده است. اولین نفر باشید!