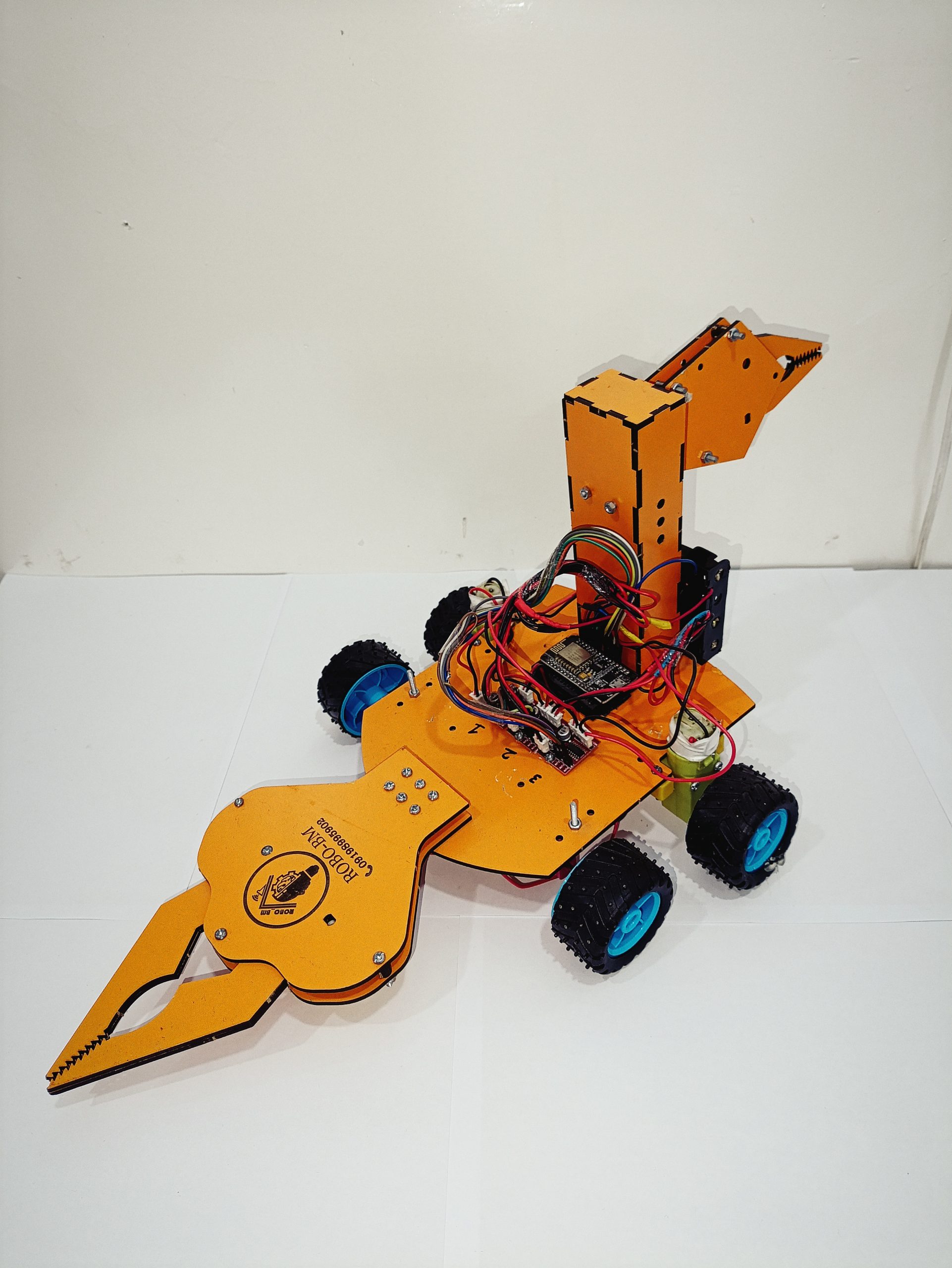
ربات کاوشگر یکی دیگر از محصولات آکادمی نخبگان خلاق جوان می باشد که در راستای آموزش رباتیک و الکترونیک عرضه می گردد.
این ربات تشکیل شده از بردبورد، گریپر، موتور نادکویی و … می باشد که امکان شناخت بهتر قطعات، کنترل ربات به وسیله تلفن همراه، یادگیری اتصالات در ربات و … را به دانش آموزان می دهد .
نحوه کارکرد ربات کاوشگر بیسیم به صورتی می باشد که با وصل کردن باتری به ربات و اتصال به اینترنت تلفن همراه،
ربات دستورات را از تلفن همراه به وسیله امواج wifi گرفته و دستورات را به پردازنده خود NODEMCU منتقل
می کند؛ NODEMCU دستورات را به درایورموتورها منتقل کرده و ربات حرکت می کند. انواع مختلفی از این ربات
وجود دارد؛ از این ربات اندازههای دیگر در عملیاتهای امداد و نجات، عملیات های اکتشافی در کره های دیگر و …
استفاده می شود.
شناخت قطعات:
گریپر چیست؟
گریپر به معنای دستگاه گیرنده است که روی قسمت انتهایی بازوی ربات نصب می شود و به کمک آن ربات ها
می توانند اشیاء را بگ یرند، حمل و جابه جا کنند. استفاده از این گیرنده ها در صنایع مختلفی مانند صنایع دارویی،
پزشکی، خودروسازی، الکترون یکی و … کاربرد دارد. برای مثال در صنای ع خودروسازی جهت جابه جایی قطعات
بزرگ و سنگ ین از گریپرها استفاده م ی شود. که این کار مزا یای زیاد ی برای تولید کنندگان دارد و می توانند بدون
استفاده از نیرو ی انسانی، هم هزینه های تولید و هم خطرات احتمالی را کاهش دهند. مزایای گریپر به شرح زیر
است:
• قابلیت کنترل: گریپرها قابلیت کنترل دقیق توسط کنترل کننده ربات یا کامپیوتر را دارند که این باعث افزایش
دقت در کار و کنترل وظایف آنها می شود.
• صرفه جویی در زمان و هزینه: گیره های رباتیک کمک می کنند تا زمان و هزینه کمتری برای جابجایی و
نگهداری محصولات خود صرف کنید .
• سازگار با شرایط سخت: گیره رباتیک می تواند در محی ط هایی که دما خیلی بالا یا پایین است، محیط هایی با
فشار بالا و آلوده هم استفاده شود.
• افزایش بهره وری: از آنجایی که این دستگاه های گیرنده می توانند وظایف خود را برای مدت طولانی بدون خطا
و خستگی انجام دهند، بنابراین بهره وری بیشتر و روند بهتری در تولید خواهیم داشت.
• افزایش ایمنی: در برخی صنایع مانند پزشکی و جراحی یا صنعت دفاعی می توانیم با استفاده از گریپر ، امنیت
کار را بالاتر ببریم. چرا که گریپر ربات می تواند اشیاء مختلف را بدون نیاز به انسان جابه جا کند که این باعث
کاهش خطر برای انسان است و قابل استفاده در محیط های خطرناک نیز می باشد .
• قابلیت تنظیم: گیره رباتیک در شکل ها و اندازه های مختلفی وجود دارد که در صورت نیاز می توانید گیرنده هایی
با شکل ها و اندازه های مختلف، بسته به نیاز خود و متناسب با محصول مورد نظر، طراحی کنید .
بردبورد
بردبورد ابزاری بسیار ساده و مناسب برای پیاده سازی مدارهای آزمایشی است که نیاز به هیچ گونه لحیم کاری
ندارد. به کمک این وس یله می توانیم یک نمونه ی ابتدایی از آنچه که قرار است در نهایت ساخته شود ایجاد کنیم.
پس از باز کردن بورد اولین چیزی که توجه شما را جلب خواهد کرد چندین ردیف نوار فلزی است که در حقیقت
آنها همان نوارهای ترمینال مدار هستند.
در ابتدای هر نوار فلزی درست در زیر سوراخ های بردبورد حالتی شبیه به گیره وجود دارد که باعث می شود
پایه های یک قطعه ی الکترون یکی در داخل سوراخ محکم سر جای خود بماند.
درایورموتور 1508MX
یکی از ارزان ترین درایورها برای راه اندازی موتورهای DC با جریان مصرف ی کمتر از 2 آمپر، درایور1508MX
می باشد . ابعاد کوچک و راهاندازی ساده، از ویژگی های مثبت این ماژول می باشد.
این درایور دارای مدار محافظ در برابر دما می باشد که در صورت تشخیص دمای بیش از حد، درایور را از کار
می اندازد. در ادامه به برخی از ویژگی های ماژول اشاره شده است:
محدوده ولتاژ عملیاتی : 2 تا 9.6 ولت DC
ماکزیمم جریان خروجی: 1.5 آمپر 2 آمپر در پیک جریانماکزیمم دمای کاری: 150 درجه سلسیوس
معرفی پایهها out Pin ماژول درایور موتور 1508MX
ماژول 1508MX دارای 10 پایه به شرح زیر است:
Vs: تغذیه موتورهای ورودی
GND: زمین
1IN: ورودی 1
2IN: ورودی 2
3IN: ورودی 3
4IN: ورودی 4
1OUT: خروجی 1
2OUT: خروجی 2
3OUT: خروجی 3
4OUT: خروجی 4
میکروکنترلر NODEMCU
امروزه کاربردها ی IOT( اینترنت اشیاء روز به روز درحال افزایش است و اتصال اشیا به هم از اهمیت زیادی
برخوردار است. روش های مختلفی برای اتصالاش یا به یکدیگر وجود دارد که از جمله آن ها اتصال با استفاده از
پروتکل WiFi است.
NODEMCUیک پلتفروم متن باز برنامه پذیر می باشد که قابلیت اتصال اش یا به هم و انتقال اطالعات از
طریق Wifi را فراهم می سازد به عالوه با فراهم آوردن برخی کاربردهای مهم میکروکنترلرها می تواند به تنهایی
بسیاری از نیازهای پروژه را برطرف سازد. اما مشخصات کلی این بورد می توان به استفاده آسان، قابلیت برنامه
نویسی، آنتن داخلی و … اشاره کرد.
چگونه NODEMCU را با IDE Arduino پروگرم کنیم؟
برای استفاده از IDE Arduino به منظور پروگرم کردن NODEMCU ابتدا باید این بورد را به نرم افزار معرف ی
کنید . برای این کار کد زیر را کپی کرده و گام پیش رو را انجام دهید :
http://arduino.esp8266.com/stable/package_esp8266com_index.json
گام اول( در منوی file بخش preferences در قسمت URLs Manager Board Additional کد کپی
شده را وارد کنید و Ok را بزنید .
گام دوم( به منوی Tools بخش Manager Boards>Boards رفته و کلمه 8266Esp را در تب موجود
سرچ کن ید و بوردهای 8266Esp را نصب کنید، پس از پا یان مراحل نصب ، لیبل نصب شده برروی بوردهای
8266Esp ظاهر می گردد.
پس از پایان این دو گام انواع بوردهای مبتنی بر 8266Esp از جمله Nodemcu به لی ست بوردهای Arduino
IDE شما اضافه می شود و با انتخاب آن می توانید برروی آن کد مدنظر خود را پروگرم کنید .
رای استفاده از پایه های دی جیتال NODMCU باید از شماره های GPIO استفاده کرد ب ه طور مثال پایه 7D
بورد با 13GPIO معرفی شده پس در برنامه هرجا نیاز به استفاده از 7D داشتید باید با پایه 13 تنظیمات را انجام
دهید . از پایه (4GPIO(2D ب ه عنوان SDA و از (5GPIO(1D بعنوان SCL می توانید استفاده کنید .
مرحله اول نصب قطعات:
قطعات به کار رفته در پروژه:
قطعات به کار رفته در پروژه تعداد قطعات
درایورموتور 1508MX عدد3
میکروکنتلر NODEMCU عدد1
بردبورد 1 عدد
گریپر ثابت جلو 1 عدد
گریپر چرخشی عقب 1 عدد
چرخ های حرکتی 4 عدد
موتور نادکویی 5 عدد
سیم دوپین 8 عدد
سیم جامپر به تعدادلازم
این ربات به صورت کلی دارای پنج موتور می باشد که با استفاده از گوشی تلفن همراه می توان آن را کنترل کرد.
برای دانلود نرم افزار لطفا به وبسایت com.RoboBM رفته و در قسمت “وبالگ ” اپلیکیشین را نصب نمایید.
برای ساخت ربات ابتدا درایور موتورها را به بدنه ربات متصل کنید، سپس سوکت های دو چرخ حرکتی ربات را
به قسمت 1MOTOR و 2MOTOR درایور موتور نصب کنید.
مرحله دوم نحوه اتصال موتورها:
ابتدا درایورموتورها را به ترتیب از 1 تا 3 نام گذاری م ی کنیم. درای ورموتورها به انتهای ربات وصل می شوند و قسمت
شارژر NODEMCU باید به سمت چپ باشد.
بردبورد را به جلوی ربات م ی چسبانیم.
گریپر بزرگ جلوی ربات و گر یپر کوچک انتهای ربات قرار می گیرد.
گریپر بزرگ را به درایور شماره 3 ، موتور A وصل می کنی م.
موتور چرخشی گریپر کوچک را به درایور شماره 3 ، موتور B وصل م ی کنیم.
موتور چرخ دار سمت چپ را به درایور شماره 2 به موتور A وصل می کنیم.
موتور چرخ دار سمت راست را به درایور شماره 2 به موتور B وصل می کنیم.
موتور گریپر کوچک را به درایور شماره 1 موتور B وصل می کنیم.
مرحله سوم نحوه اتصال چرخ ها:
5 عدد سیم از NODEMCU از 0D تا 4D وصل می کن یم.
3 عدد سیم از 5D تا 7D وصل می کنیم.
برای 8D دو عدد سیم برداشته از وسط قیچی کرده و به یک سیم دو سر ماده و یک سر نر تبدیل می کنیم سپس
در 8D جایگذاری می کنیم.
از 0D به درایور شماره 3 به 3IN وصل م ی کنیم.
از 1D به درایور شماره 3 به 1IN وصل م ی کنیم.
از 2D به درایور شماره 3 به 2IN وصل م ی کنیم.
از 3D به درایور شماره 1 به 4IN وصل م ی کنیم.
از 4D به درایور شماره 2 به 1IN وصل م ی کنیم.
از 5D به درایور شماره 2 به 2IN وصل م ی کنیم.
از 6D به درایور شماره 2 به 3IN وصل م ی کنیم.
از 7D به درایور شماره 2 به 4IN وصل م ی کنیم.
از 8D به درایور شماره 3 به 4IN و درایور شماره 1 به 3IN وصل می کنیم.
مرحله چهارم نحوه اتصال باتری ها:
در جاباتری ، قرمز را به قرمز و مشکی را به مشکی وصل می کنیم موازی می کنیم. به جاباتری سه عدد سیم
دوپین را طوری وصل میکنیم که مثبت جاباتری به سیم قرمز سیم دوپین ها و منفی جا باتری به سیم مشکی
سیم دوپین ها متصل شود؛ به دسته منفی ها و دسته مثبت ها هر کدام یک عدد سیم جامپر نر لحیم می کنیم.
هر کدام از سیم دوپین ها را به قسمت تغذیه یکی از درایور موتورها متصل می کنیم و سیم جامپر های لحیم
شده هم مطابق شماتیک به NODEMCU متصل می شود. توجه کنید بعد از اتصال باتری ها به هیچ عنوان
اتصاالت مدار را تعویض و یا لمس نکنید.
مرحله پنجم راه اندازی ربات:
ابتدا اپلیکشن ROBOBM را از طریق مجموعه ROBOBM دریافت کنید. HOTSPOT تلفن همراه خود را
روشن کرده و نام دستگاه خود را به 111 تغییر داده و رمز دستگاه خود را 00000000 قرار دهید.
وارد اپلیکشن شوید و در قسمت IP INTER رمز ربات را به صورت التین وارد کنید.
موسسه ROBO_BM در سال ۱۳۹۲ توسط جمعی از مهندسین و دانش آموزان تهران به طور رسمی آغاز به فعالیت نمود و پا به عرصه ی مسابقات رباتیک،برنامه نویسی وچرتکه منطقه ای ، استانی و کشوری نهاد. از آغازین روزهای تاسیس ROBO_BM معتمد مخاطبان وفادار خود بوده ایم و سهم این مجموعه در پاسداشت این نگاه تا به امروز پاسخ شفاف به اعتماد و کسب رضایت درونی دانش آموزانمان بوده است.
 سبد خرید
سبد خرید  علاقهمندی
علاقهمندی  پروفایل
پروفایل 
هنوز دیدگاهی برای این مطلب ثبت نشده است. اولین نفر باشید!